
This project is my capstone project during 2025 Summer adviced by Prof. John Reid at University of Illinois Urbana-Champaign. This project focuses on the development of a sonar-based system designed to map underwater environments and identify potential shallow-water hazards. Using a Blue Robotics BlueBoat platform, our team integrated an array of sonar sensors to collect depth and imaging data, which was then processed to generate detailed visualizations of underwater terrain. While we successfully created a comprehensive depth map of a local lake, challenges with side-scan sonar data quality highlighted key areas for future improvement. This work lays a foundational pipeline for applications in aquaculture, environmental monitoring, and marine safety.
Introduction
Navigating and understanding shallow-water environments presents a unique set of challenges. From submerged debris to unmapped changes in terrain, unseen hazards can pose significant risks to marine activities. The motivation behind this project was to develop an accessible and effective system for mapping these environments. By creating detailed underwater maps and identifying hazards, this technology can enhance safety for marine operations, support critical environmental monitoring, and provide valuable data for aquaculture management. Our goal was to build a robust foundation for a system that could eventually perform these tasks autonomously.
Approaches
Our system was built around the BlueBoat, an unmanned surface vehicle (USV), which served as our mobile sensor platform. The following figure is a simplified diagram of our system architecture, showing the data flow from the BlueBoat to the ground control station.
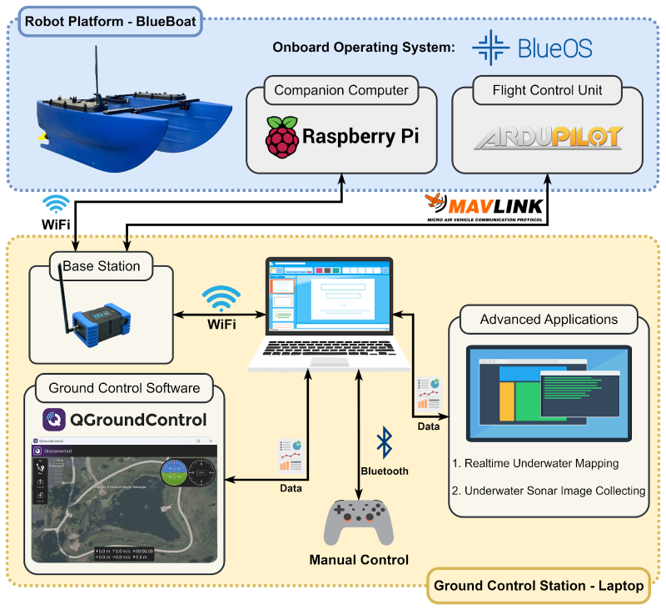
Figure 1. System architecture
> Platform & Onboard System
The BlueBoat was equipped with a Raspberry Pi companion computer running BlueOS and an ArduPilot-based flight control unit for navigation. All onboard components communicated using the MAVLink protocol. For data acquisition, we integrated a Ping Sonar Altimeter/Echosounder and Cerulean Omniscan 450 side-scan sonar units.
> Ground Control & Data Workflow
TA ground station, consisting of a laptop running QGroundControl software, communicated with the BlueBoat via a WiFi link. To ensure the operational stability of the vessel, we designed the architecture to offload computationally intensive tasks—like real-time mapping and sonar data processing—from the boat to the more powerful ground station laptop. Missions were planned in QGroundControl, and the boat was operated under manual control to collect GPS-tagged depth and sonar data. This raw data was then processed using Python scripts to generate visualizations.
Results
Our efforts yielded mixed but valuable results. Our primary success was the generation of a detailed 2D underwater depth map. By processing the GPS coordinates and corresponding depth measurements from the sonar altimeter, we created a set of discrete data points along the vehicle's survey path. Using a mathematical interpolation method, we transformed this sparse data into a continuous grid, successfully producing a cohesive bathymetric map that clearly visualizes the lakebed topography.
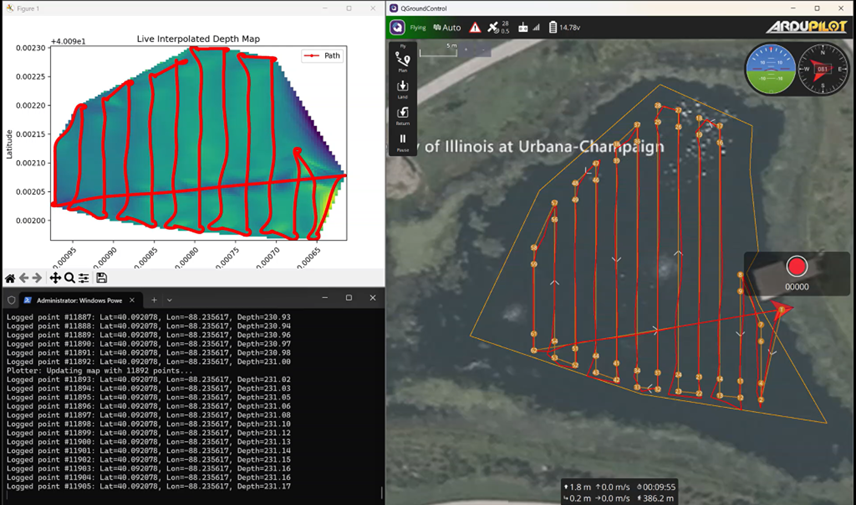
Figure 2. Result of 2D underwater map along with the depth sonar sensor
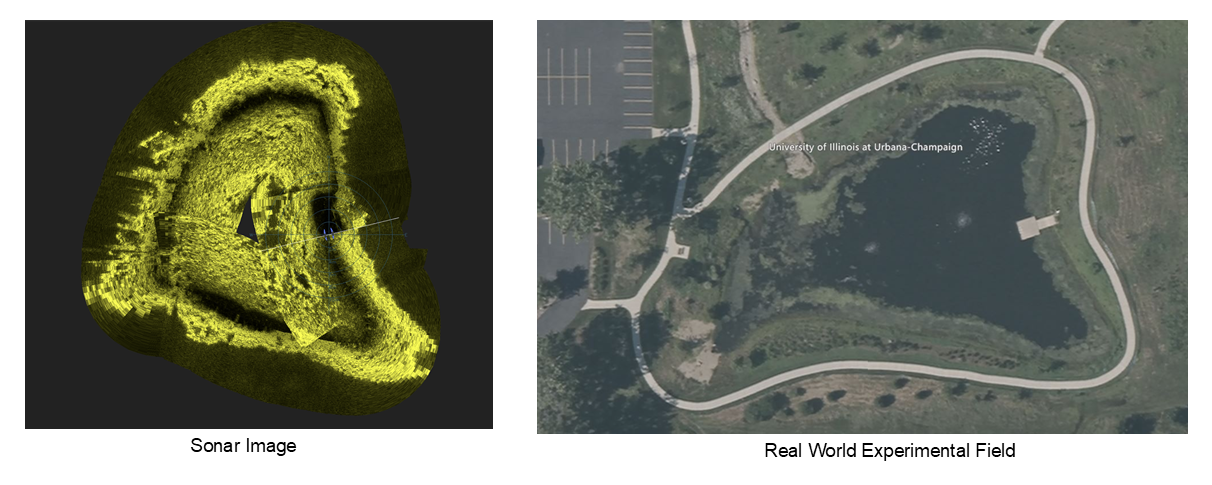
Figure 2. Result of side-scan sonar data processing
> Demo Video
Conclusion and Future Work
This project successfully established a functional pipeline for underwater depth mapping using a USV. We demonstrated the ability to integrate hardware, collect sensor data, and process it into a meaningful visualization. However, the limitations encountered with the side-scan sonar data underscore the challenges inherent in underwater imaging and the need for further refinement. Future work will focus on improving the side-scan sonar data pipeline to enhance image quality. We also recommend introducing more controlled obstacles to systematically test the system's detection capabilities. This project serves as a solid foundation for future development, with the eventual goal of incorporating autonomous survey planning and AI-based object classification to create a truly intelligent marine mapping and hazard detection system.
References
BlueBoat Platform: https://bluerobotics.com/store/vehicles/blueboat/
BlueOS Documentation: https://blueos.cloud/docs/latest/usage/overview/